Aufbau¶
Ziel Aufbau¶
Um den Aufbau mit möglichst wenig Bauteilen zu erstellen, sollte das HIMO-01P Funkmodul über ein Arduino direkt an
ein MacBook angeschlossen werden. Der Arduino soll als Serielle Brücke zwischen den Host System und dem Funkmodul dienen,
siehe Abb. 2.
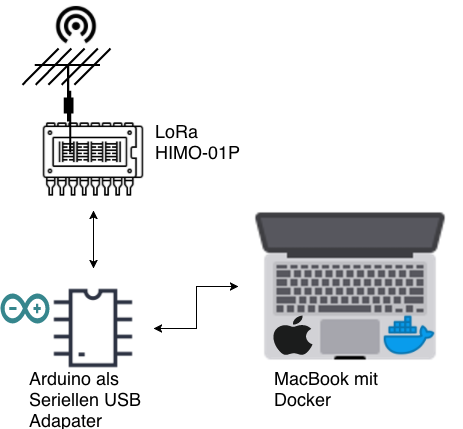
Abb. 2 Ziel Aufbau
Als Endprodukt soll via eine Website ein Echtzeit-Chat aufgebaut werden, worüber alle Teilnehmer des Netzwerkes automatisch aufgelistet werden und jeder Teilnehmer ein eigenen Chat Verlauf erhält.
Als Grundlage für die Website dient Django, welches in einem Docker Container gestartet werden soll, um die Anwendung Plattformunabhänig zu gestalten. Außerdem dient Docker in diesem Fall, das System auch in Zukunft auf neuen System auszuführen, ohne Anpassungen am Quellcode zu tätigen.
Probleme mit dem Ziel Aufbau¶
Nicht vollfunktionsfähige Arduino Nanos Kopien¶
Nicht alle Arduino Kopien funktionieren wie vorgeschrieben, in diesen Aufbau gab es bei 2 verschiedenen Modellen unterschiedliche Probleme:
- Das erste Modell funktinierte die Kommunikation über den
RXundTXPort nicht. - Bei dem zweiten Modell lieferte über den
3.3VStromausgang eine zu niedrige Spannung, wodurch dasHIMO-01PModul nicht betrieben werden konnte.
Defekte Kabel¶
Ohne das dies am Anfang bemerkt wurde, gabe es in den ersten Versuchen defekte Kabel:
- Ein einardriges Kabel zur Verbindung von dem Arduino mit dem
HIMO-01Pwar gebrochen. - Das Micro USB Kabel, zum betreiben des Arduinos, besaß keine Leitung zur Kommunikation zwischen dem Host und dem Arduino. Es lieferte auschließlich Strom.
Docker USB Geräte Freigabe unter Mac¶
Da für MacOS und Windows andere USB-Treiber für die Endgeräte notwendig sind als Linux, ist es nicht möglich USB-Hardware für Docker freizugeben. Das Problem ist bei den Docker Entwickler seid Jahren bekannt, da dies aber eine niedrige Prioität besitzt, gibt es bislang keine Offizielle Lösung.
Umgesetzter Aufbau¶
Um die Probleme zu lösen, wurde das Host System mit ein Ubuntu 18.04 ausgetauscht und als Arduino wird ein Arduino Uno verwendet, siehe Abb. 3.
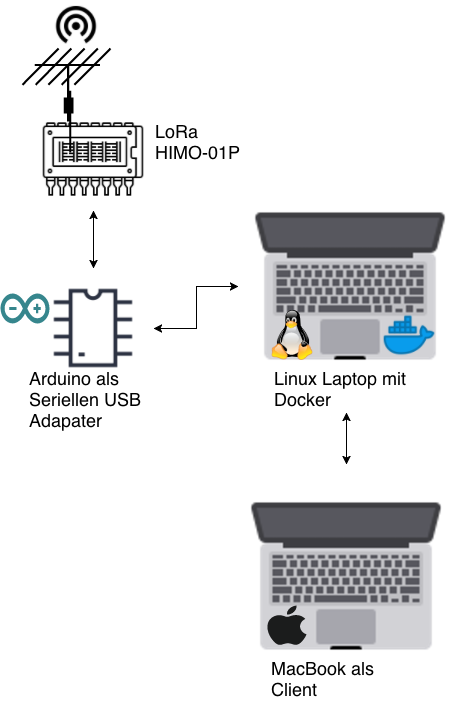
Abb. 3 Umgesetzter Aufbau
Docker¶
Die Docker Container werden via einer Docker-Compose Datei verwaltet. Darin werden die Abhänigkeiten innerhalb der Container festgelegt, auch welche Resoucen die Container von dem Host System erhalten.
Als Grundlage des Projektes wurde cookiecutter-django genommen, welches eine funktionierende Django Anwendung für Docker erstellt.
Für diesen Aufbau werden 3 Container erstellt:
django: Enthält die Website basierend auf Django und ein Daemon zur Interaktion mitHIMO-01Ppostgres: Postgres Datenbankredis: Redis Server als Cache für Websockets und als Message Queue für denHIMO-01PDaemon
In Abb. 4 wird der Aufbau grafisch Dargestellt.
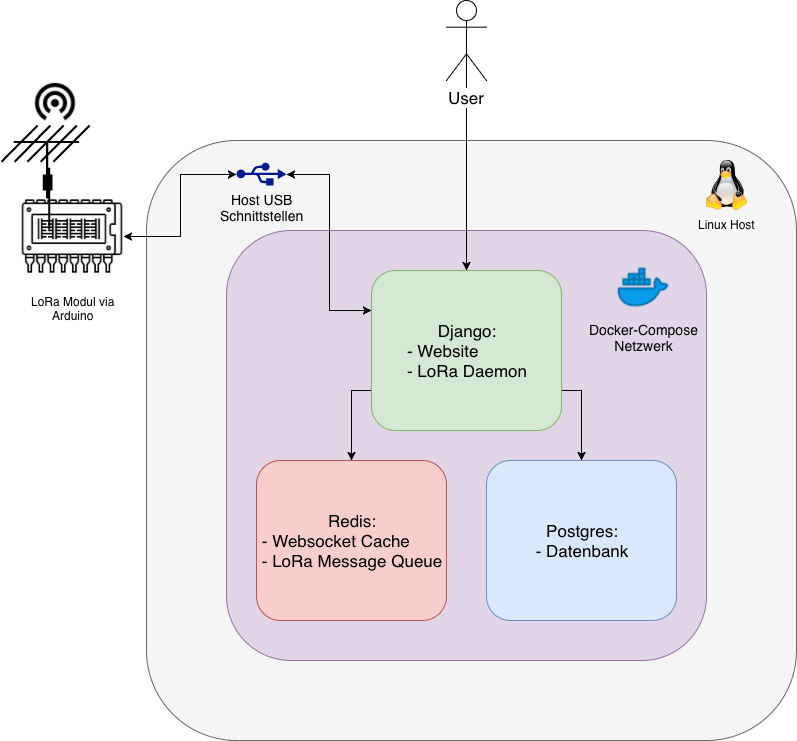
Abb. 4 Docker Aufbau
Website¶
Die Website enhält die Komponenten Frondend, Backend, Redis Cache und den LoRa Daemon für das HIMO-01P Modul.
Das Frondend Kommuniziert über Websockets direkt mit dem Django Backend, es sendet zum Server ausgehende Nachrichten und erhält vom Backend neue bzw. update von Nachrichten und Nodes.
Für das caching von den Nachrichten nutz das Backend ein Redis Server für die Websockets & Ausgehende LoRa Nachrichten.
Sobald ein Node oder Message Objekt innerhalb der Datenbank geändert oder neu erstellt wird, sendet anschließend
das Backend diese Information zum Client via Websocket.
In Abb. 5 ist die Kommunikation als Diagramm Dargestellt.
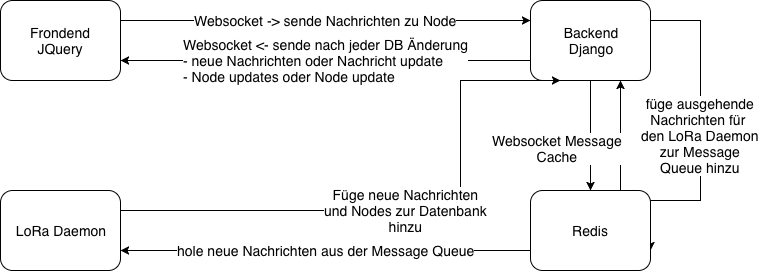
Abb. 5 Website Aufbau